Qué es un Servomotor
Un servomotor es un dispositivo electromecánico que integra un motor eléctrico, un mecanismo de retroalimentación y un controlador con el objetivo de lograr un control extremadamente preciso de la posición o velocidad de un eje de rotación.
Estos dispositivos son reconocidos por su capacidad para girar hacia una ubicación específica y mantenerse firmes en dicha posición, lo que los hace ideales para aplicaciones que exigen un alto grado de precisión. Entre estas aplicaciones se incluyen campos como la robótica, la automatización industrial, la impresión 3D y la electrónica de consumo.
En cuanto a su compatibilidad con placas de desarrollo, la mayoría de los servomotores son perfectamente compatibles con plataformas populares como Arduino. Esta compatibilidad se debe a la existencia de bibliotecas y pines especialmente diseñados en Arduino que permiten un control eficiente de los servomotores.
Conectar directamente los servomotores a las salidas PWM (Modulación de Ancho de Pulso) de una placa Arduino es un proceso sencillo y, además, se pueden programar para realizar movimientos precisos y alcanzar las posiciones deseadas con gran precisión.
Además de Arduino, hay otras placas y microcontroladores, como Raspberry Pi, que también son compatibles con los servomotores. Esto brinda a diseñadores y entusiastas una amplia variedad de opciones para lograr un control preciso en sus proyectos, ya que pueden elegir la plataforma que mejor se adapte a sus necesidades y preferencias.
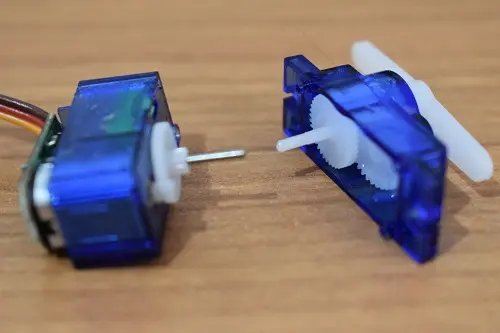
Cómo funciona un Servomotor por dentro
Dentro de un servomotor, se encuentra un conjunto de componentes fundamentales diseñados para lograr un control de posición o velocidad extremadamente preciso. En primer lugar, el elemento central es el motor eléctrico, generalmente un motor de corriente continua (DC), que proporciona la potencia necesaria para generar el movimiento rotativo. Este motor está conectado al eje del servomotor y es la fuente principal de movimiento.
El siguiente componente clave es el mecanismo de retroalimentación, que suele ser un potenciómetro o un codificador. Este mecanismo está conectado al eje del motor y proporciona información constante y precisa sobre la posición actual del mismo.
El controlador, que actúa como el «cerebro» del servomotor, recibe señales de control que indican la posición deseada para el eje del motor. Compara continuamente esta posición deseada con la posición real proporcionada por el mecanismo de retroalimentación y determina cómo ajustar la energía suministrada al motor para mantener o alcanzar la posición deseada.
Además de estos componentes, los servomotores a menudo incorporan engranajes y ejes que transmiten el movimiento del motor, lo que permite ajustes finos y precisos, y una carcasa que protege y alberga todos estos elementos para garantizar su funcionamiento seguro y duradero.
En conjunto, estos componentes permiten que el servomotor funcione con alta precisión y se utilice en una amplia variedad de aplicaciones que requieren un control de posición o velocidad extremadamente preciso, como en la industria de la automatización, la robótica y la aviación.
Cómo controlar un servo con Arduino Nano
Para llevar a cabo este proyecto, asegúrate de contar con los siguientes materiales:
1 placa Arduino.
1 servomotor.
1 breadboard.
Cables de conexión.
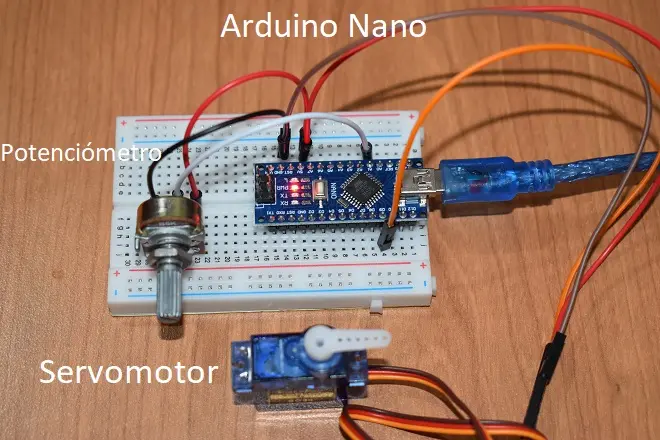
Conexiones físicas
Para comenzar, coloca el Arduino Nano en una breadboard para simplificar las conexiones.
Luego, conecta el cable de señal del servomotor (generalmente de color naranja) a uno de los pines de salida PWM en el Arduino Nano, por ejemplo el pin 9.
Enseguida, conecta el cable de alimentación del servomotor (por lo general, rojo o marrón) al pin 5V del Arduino Nano, lo que proporcionará la energía necesaria para el servomotor.
Además, conecta el cable de tierra (negro) del servomotor al pin GND del Arduino Nano para establecer una referencia común.
Finalmente, conecta el Arduino Nano a tu computadora utilizando el cable USB para que puedas cargar y ejecutar tus programas en el Arduino.
Sketch para realizar un barrido angular de 180 grados con un Servo
Carga el siguiente Sketch a tu Arduino y verás cómo el aspa del servomotor se mueve de un lado a otro en un ángulo de 180 grados, ¡es como si estuviera saludando!
#include <Servo.h>
int servoPin = 9;
Servo miservo;
int angulo = 0;
void setup(){
miservo.attach(servoPin);
}
void loop(){
for(angulo = 0; angulo < 180; angulo++)
{
miservo.write(angulo);
delay(20);
}
for(angulo = 180; angulo > 0; angulo--)
{
miservo.write(angulo);
delay(20);
}
}Sketch para Controlar un Servomotor con un Potenciómetro
Para este proyecto, será necesario agregar un potenciómetro a la configuración anterior.
Coloca el potenciómetro en la breadboard y conecta sus terminales al Arduino de la siguiente manera: conecta uno de los terminales del potenciómetro al pin de 5V del Arduino y el otro terminal al pin GND. Luego, conecta el terminal central del potenciómetro a uno de los pines analógicos, por ejemplo el pin A1.
Una vez completadas las conexiones, carga el siguiente código en tu Arduino. Este código permitirá que el potenciómetro controle la posición del servomotor de manera proporcional a la posición del potenciómetro. De esta manera, podrás ajustar la posición del servomotor girando el potenciómetro.
#include <Servo.h>
int potenPin=1;
int servoPin=9;
Servo miservo;
void setup() {
miservo.attach(servoPin);
}
void loop() {
int reading=analogRead(potenPin);
int angle=reading/6;
miservo.write(angle);
}
¿Cómo puedo alimentar un servomotor cuando uso un Arduino Nano, dado que el servomotor puede requerir más corriente de la que el Nano puede proporcionar directamente?